Aurora Drone Ops
An autonomous drone fleet control and patrol simulation platform featuring real-time telemetry and spatial boundary logic.

Project Overview
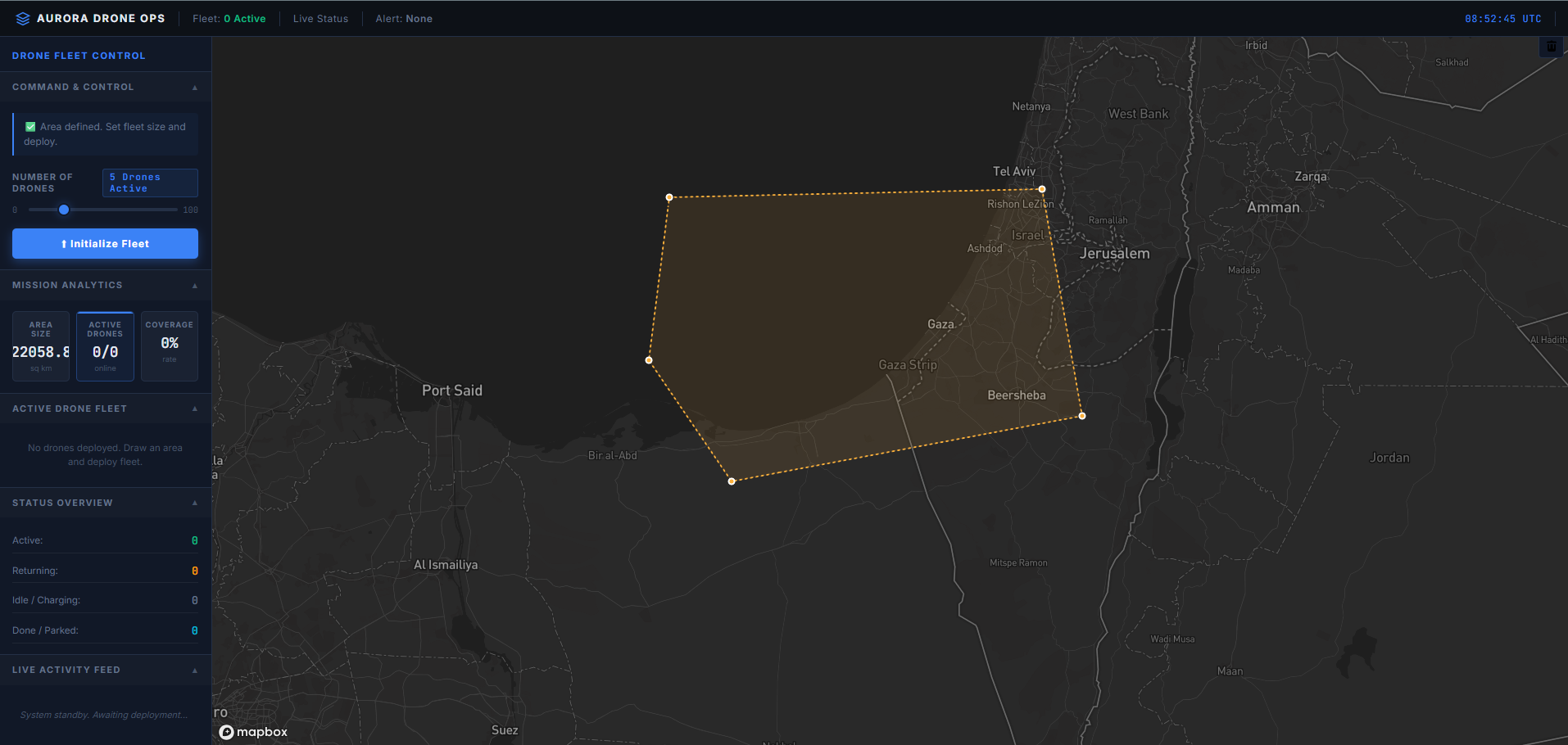
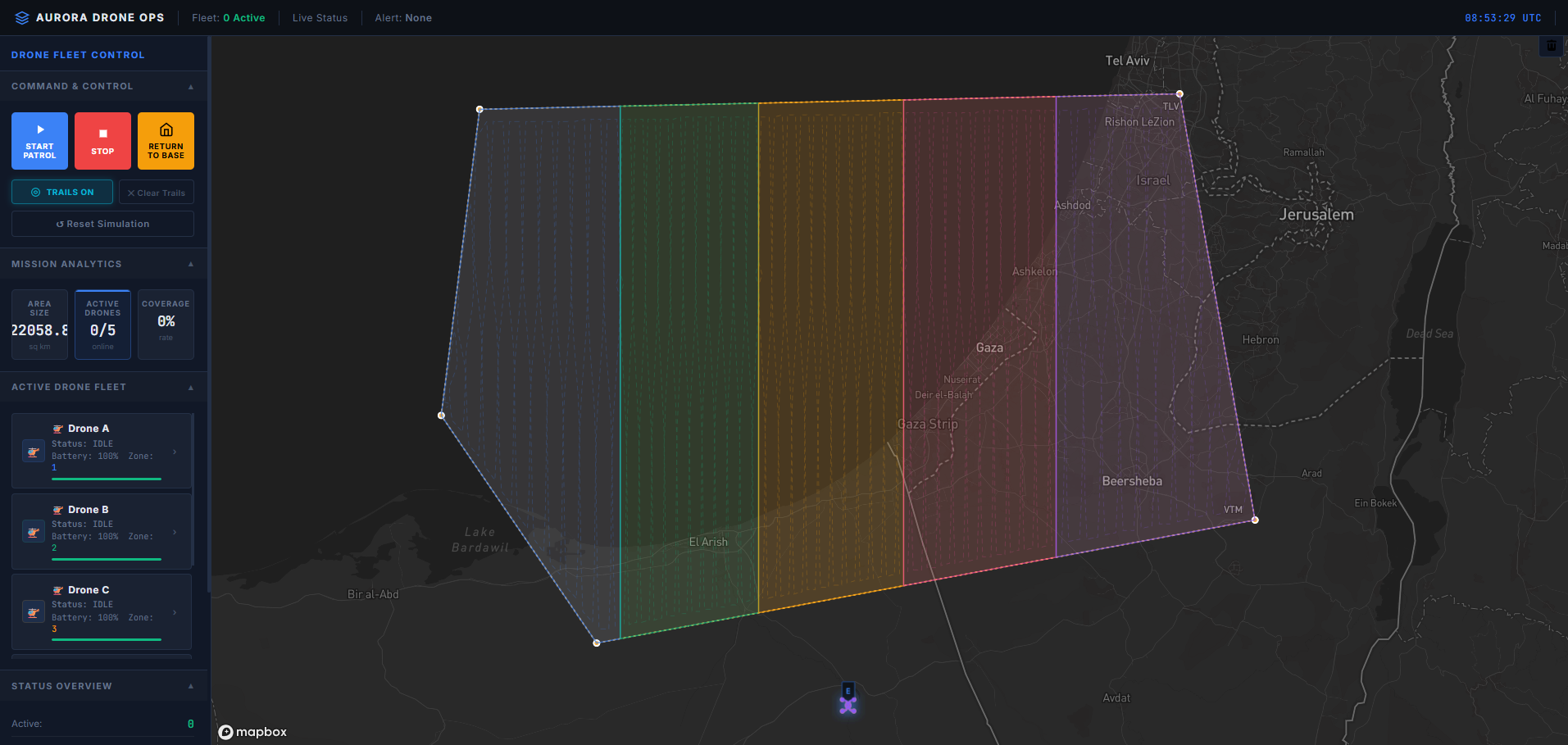
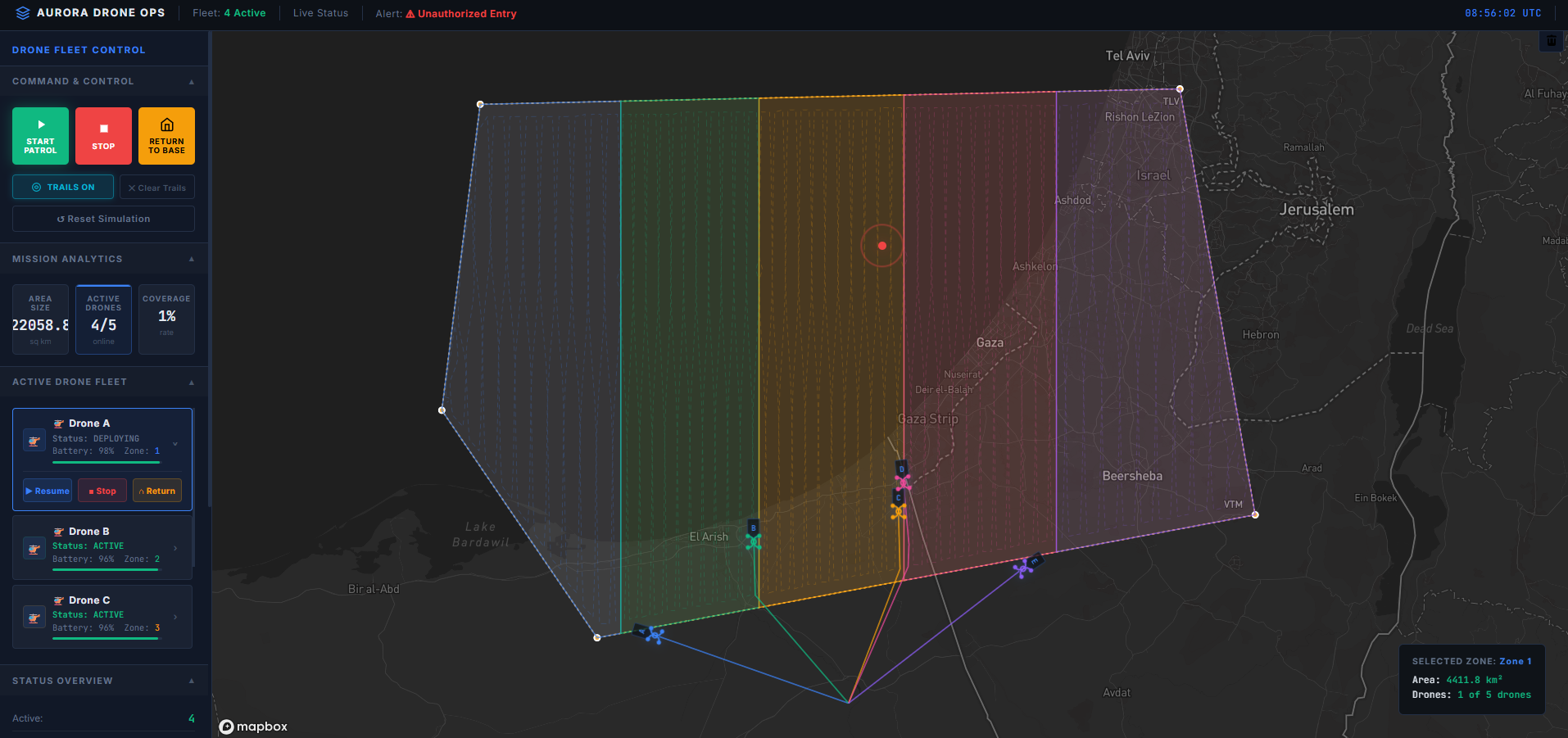
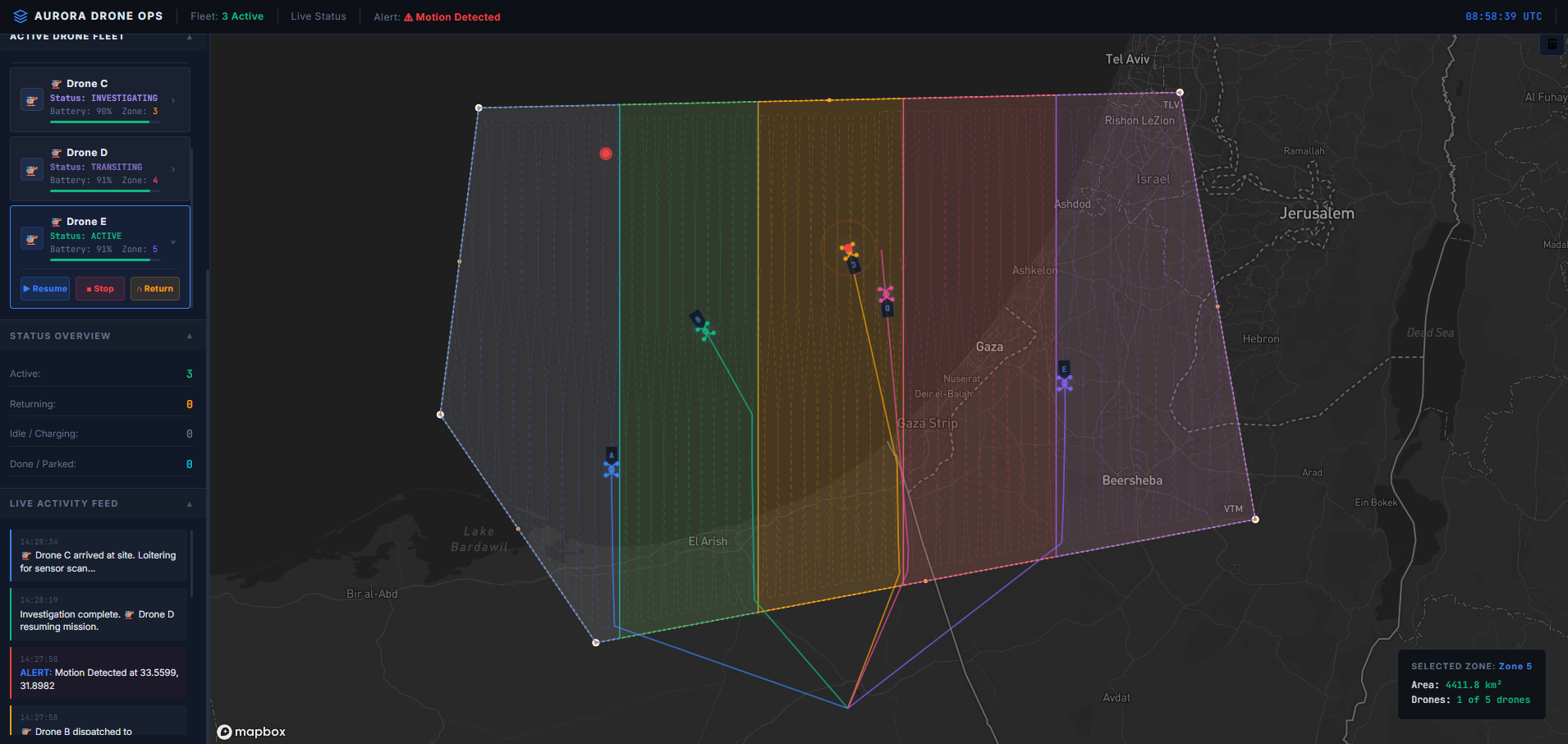
Aurora Drone Ops is a high-fidelity surveillance simulation platform designed for managing autonomous drone fleets. Built using Vanilla JavaScript, Mapbox GL JS, and Turf.js, the system allows operators to define custom patrol zones via an interactive drawing interface. The platform autonomously calculates optimal mission paths, tracks real-time telemetry across multiple drone units, and features a dynamic HUD for live status monitoring and automated alert dispatching. With its futuristic glassmorphism UI and robust spatial logic, the platform demonstrates the potential for automated aerial surveillance and logistics management.
Key Features
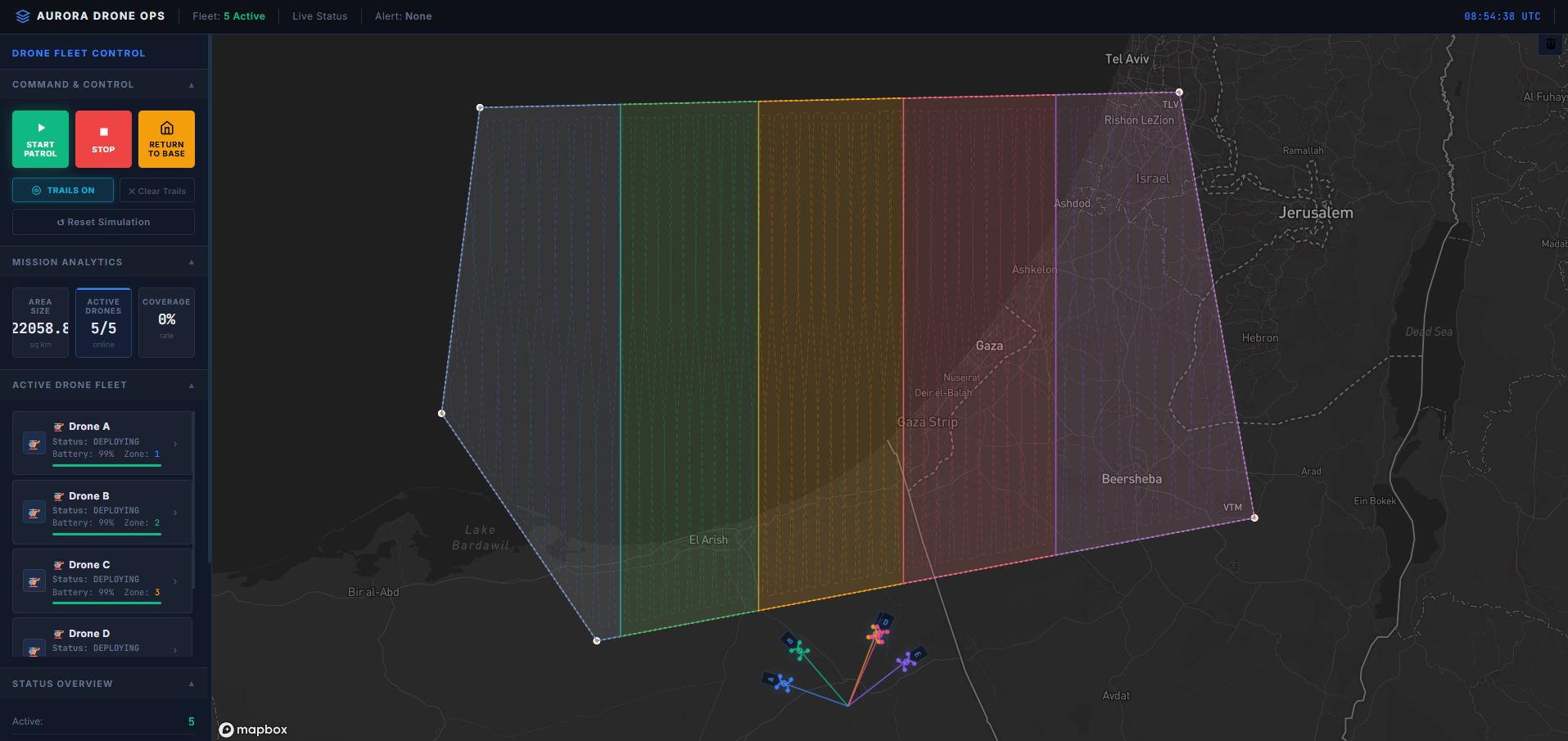
Real-time drone fleet tracking with live telemetry monitoring
Detailed implementation of this feature ensured optimal user experience and performance.
Autonomous patrol zone calculation using Turf.js spatial logic
Detailed implementation of this feature ensured optimal user experience and performance.
Interactive Mapbox GL Draw integration for custom mission planning
Detailed implementation of this feature ensured optimal user experience and performance.
Dynamic HUD with futuristic holographic glassmorphism design
Detailed implementation of this feature ensured optimal user experience and performance.
Automated alert system for target detection and equipment status
Detailed implementation of this feature ensured optimal user experience and performance.
Mission analytics with live coverage and duration tracking
Detailed implementation of this feature ensured optimal user experience and performance.
High-performance rendering for multi-entity simulations
Detailed implementation of this feature ensured optimal user experience and performance.
Project Gallery
Challenges & Solutions
Real-time Spatial Synchronization
Maintaining 60FPS animations for multiple drones while processing complex spatial intersections
Optimized animation loops and minimized DOM overhead by leveraging Mapbox GeoJSON source updates for smooth multi-entity tracking
Autonomous Boundary Logic
Ensuring drone entities strictly adhere to complex, user-defined polygon boundaries during patrol
Implemented Turf.js spatial interpolation and coordinate validation to automatically correct paths and maintain mission integrity
Next Project
